pid算法,全称为比例积分微分控制算法,是一种控制系统中常用的反馈控制算法,主要用于自动控制和工业过程控制领域。pid算法通过对目标物理系统的状态进行测量并与所需状态进行比较,从而调整控制系统的输出。
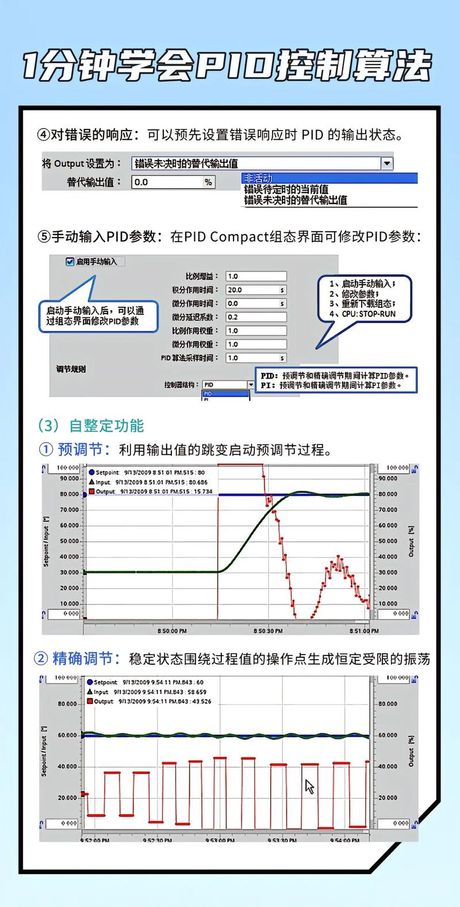
pid算法由比例控制、积分控制和微分控制三部分组成。其中,比例控制是根据当前误差值与目标值之间的差异大小来控制输出;积分控制是根据时间积分误差来控制输出;微分控制则是通过检测误差变化率来控制输出。
pid算法应用广泛,包括温度控制、速度控制、水平控制、压力控制等多个领域,是工业自动化控制系统中最基本和经典的算法之一。但是,pid算法也存在一些缺点,比如容易受到噪声干扰,需要精确定义调整系数,以及不能适应非线性系统等问题。